
融合定位系统的误差与什么有关
在当今科技日新月异的时代,融合定位系统作为精准导航与定位的关键技术,广泛应用于智能手机、自动驾驶、无人机及智能物流等领域。然而,这一技术的准确性并非无懈可击,其误差来源复杂多样,深刻影响着定位精度与用户体验。那么,融合定位系统的误差究竟与哪些因素有关呢?
一、传感器精度与校准
融合定位系统通常集成多种传感器,如GPS、陀螺仪、加速度计、磁力计等,这些传感器的原始数据精度直接决定了后续融合算法的效果。传感器本身的精度差异、长期使用后的性能退化以及校准不当,都是导致定位误差的重要因素。
二、环境因素影响
环境因素对融合定位系统的干扰不容忽视。在高楼林立的城市峡谷中,GPS信号易受遮挡,导致定位延迟或精度下降;而在恶劣天气条件下,如暴雨、雾霾,信号衰减进一步加剧,影响定位稳定性。此外,电磁干扰、磁场异常等也会干扰到磁力计等传感器的正常工作。
三、算法优化与数据处理
融合定位系统的核心在于算法,它负责将来自不同传感器的数据进行融合处理,以得出合理的定位结果。算法的优化程度、数据处理的实时性与准确性,直接关系到误差的大小。算法设计不合理、数据处理不精细,都可能导致误差累积,影响定位精度。
四、动态性能与运动模式
用户或设备的运动状态也是影响定位误差的重要因素。在高速运动、急转弯或剧烈震动等情况下,传感器数据可能产生较大波动,给融合算法带来挑战。因此,如何有效应对不同运动模式下的定位需求,是提升融合定位系统性能的关键。
综上所述,融合定位系统的误差与传感器精度与校准、环境因素、算法优化与数据处理以及动态性能与运动模式等多方面因素有关。为了提升定位精度与稳定性,需从硬件、软件及算法等多个层面进行持续优化与创新。
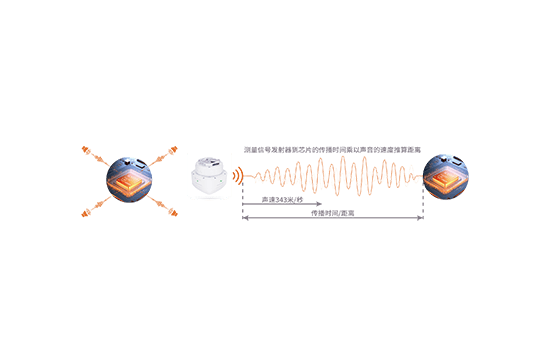
深圳沧穹科技是一家以音频技术为核心、多源信息融合的高精度室内定位导航一体化技术方案提供商,拥有从音射频信号、芯片、天线、模组到定位基站、定位终端、定位算法的全栈技术研发能力。如果您也有这方面需求的,可以随时咨询:400-968-4123
;){kind=link}